Percobaan 1
Menjalankan MOTOR DC
1. Kondisi kembali
Buatlah motor bergerak 6 detik lalu berhenti 2 detik.
2. Hardware kembali

3. Rangkaian Percobaan kembali
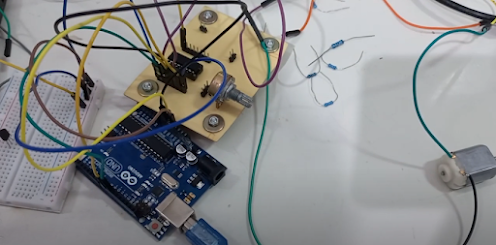
4. Prinsip Kerja Rangkaian kembali
Prinsip kerja rangkaian percobaan 1 ini adalah program yang telah kita upload ke arduino akan mengeluarkan output HIGH dan LOW ke pin yang dideklarasikan. kemudian, akan diteruskan ke kaki In1 dan In2 motor driver. motor driver akan memunculkan output tegangan di kaki out1 dan out2 sesuai dengan biner pada in1 dan in2. ini bisa dilakukan jika kaki enable1 diberi logika HIGH.
5. Listing Program kembali
#define in1 10 //Deklarasi pin 10 sebagai input 1#define in2 9 //Deklarasi pin 9 sebagai input 2void setup() { //Semua kode dalam fungsi ini di eksekusi sekalipinMode(in1, OUTPUT); //Deklarasi in1 sebagai OUTPUTpinMode(in2, OUTPUT); //Deklarasi in2 sebagai OUTPUT}void loop() { //Semua kode dalam fungsi ini dieksekusi berulangdigitalWrite(in1, HIGH); //in1 diberi logika 1digitalWrite(in2, LOW); //in2 diberi logika 0delay(6000); //Jarak waktu 1000 ms setelah input dieksekusidigitalWrite(in1, LOW); //in1 diberi logika 0digitalWrite(in2, LOW); //in2 diberi logika 0delay(2000); //Jarak waktu 1000 ms setelah input dieksekusidigitalWrite(in1, LOW); //in1 diberi logika 0digitalWrite(in2, HIGH); //in2 diberi logika 1delay(6000); //Jarak waktu 1000 ms setelah input dieksekusidigitalWrite(in1, LOW); //in1 diberi logika 0digitalWrite(in2, LOW); //in1 diberi logika 0delay(2000); //Jarak waktu 1000 ms setelah input dieksekusi}
#define in1 10 //Deklarasi pin 10 sebagai input 1
#define in2 9 //Deklarasi pin 9 sebagai input 2
void setup() { //Semua kode dalam fungsi ini di eksekusi sekali
pinMode(in1, OUTPUT); //Deklarasi in1 sebagai OUTPUT
pinMode(in2, OUTPUT); //Deklarasi in2 sebagai OUTPUT
}
void loop() { //Semua kode dalam fungsi ini dieksekusi berulang
digitalWrite(in1, HIGH); //in1 diberi logika 1
digitalWrite(in2, LOW); //in2 diberi logika 0
delay(6000); //Jarak waktu 1000 ms setelah input dieksekusi
digitalWrite(in1, LOW); //in1 diberi logika 0
digitalWrite(in2, LOW); //in2 diberi logika 0
delay(2000); //Jarak waktu 1000 ms setelah input dieksekusi
digitalWrite(in1, LOW); //in1 diberi logika 0
digitalWrite(in2, HIGH); //in2 diberi logika 1
delay(6000); //Jarak waktu 1000 ms setelah input dieksekusi
digitalWrite(in1, LOW); //in1 diberi logika 0
digitalWrite(in2, LOW); //in1 diberi logika 0
delay(2000); //Jarak waktu 1000 ms setelah input dieksekusi
}
6. Analisa kembali
1) Jelaskan prinsip kerja rangkaian!
jawab :
Prinsip kerja rangkaian percobaan 1 ini adalah program yang telah kita upload ke arduino akan mengeluarkan output HIGH dan LOW ke pin yang dideklarasikan. kemudian, akan diteruskan ke kaki In1 dan In2 motor driver. motor driver akan memunculkan output tegangan di kaki out1 dan out2 sesuai dengan biner pada in1 dan in2. ini bisa dilakukan jika kaki enable1 diberi logika HIGH.
2) Jelaskan prinsip kerja rangkaian H-Bridge pada motor driver L293D!
jawab:
gambar di atas adalah rangkaian hbridge pada motor driver menggunakan transistor npn. saat in1 deberi logika 1 dan in 2 diberi logika 0, maka transistor 1 dan transistor 3 akan aktif sedangkan transistor 2 dan transistor 2 dan 4 akan mati. oleh karena itu arus dapat mengalir dari vcc ke T1 kemudian ke kaki A pada motor lalu keluar ke kaki B menuju transistor 3 dan berakhir di ground. begitu juga jika in1 dan in2 dibalik keadaannya, maka T2 dan T4 yang aktif dan arus motor mengalir dari B ke A. namun, jika in1 dan in2 sama sama 1 atau 0 maka motor berhenti.
3) bagaimana cara mengganti arah pergerakan motor dc?
jawab:
cara mengganti arahnya yaitu dengan mengubah logika inputan pada motor driver.
Tidak ada komentar:
Posting Komentar