a. Mengetahui tentang pir sensor, sensor infrared, sound sensor
b. Mengetahui Simulasi rangkaian encoder decoder
c. Mengetahui tabel kebenaran dari jenis gerbang logika dan IC yang digunakan
d. Mengetahui Tripod Otomatis
2. Alat Dan Bahankembali
| No | Nama Alat | Spesifikasi | Jumlah |
| 1 | Gambar layout komponen | 1 set | |
| 2 | Ground | 1 set | |
| 3 | power | 1 buah | |
| 4 | Solder | 1 buah | |
| 5 | Penyedot timah | 1 buah | |
| 6 | Tang potong | 1 buah | |
| 7 | Tang lancip | 1 buah | |
| 8 | Mistar baja | 1 buah | |
| 9 | Landasan solder | 1 buah | |
| 10 | Mata bor | 1 buah |

INSTRUMEN :


Voltmeter DC

Difungsikan guna mengukur besarnya tegangan listrik yang terdapat dalam suatu rangkaian listrik. Dimana, untuk penyusunannya dilakukan secara paralel sesuai pada lokasi komponen yang sedang diukur.




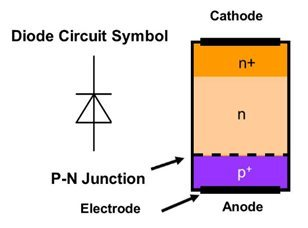
Dioda adalah komponen elektronika yang terdiri dari dua kutub dan berfungsi menyearahkan arus. Komponen ini terdiri dari penggabungan dua semikonduktor yang masing-masing diberi doping (penambahan material) yang berbeda, dan tambahan material konduktor untuk mengalirkan listrik.












KOMPONEN INPUT :

Sound Detection Sensor Module Pin Configuration
Pin Name | Description |
VCC |
The Vcc pin powers the module, typically with +5V |
GND | Power Supply Ground |
DO | Digital Output Pin. Directly connected to digital pin of Microcontroller |
AO | Analog Output Pin. Directly connected to an analog pin of Microcontroller |
Sound Detection Sensor Module Features & Specifications
Operating Voltage: 3.3V to 5V DC
LM393 comparator with threshold preset
PCB Size: 3.4cm * 1.6cm
Induction distance: 0.5 Meter
Operating current: 4~5 mA
Microphone Sensitivity (1kHz): 52 to 48 dB
Easy to use with Microcontrollers or even with normal Digital/Analog IC
Small, cheap and easily available


PIR Sensor Module Pinout Configuration
Pin Number | Pin Name | Description |
1 | Vcc | Input voltage is +5V for typical applications. Can range from 4.5V- 12V |
2 | High/Low Ouput (Dout) | Digital pulse high (3.3V) when triggered (motion detected) digital low(0V) when idle(no motion detected |
3 | Ground | Connected to ground of circuit |
 |
| Gambar 3.2a. Grafik Pir terhadap arah , jarak, dan kecepatan |
Pada grafik tersebut ; (a) Arah yang berbeda mengasilkan tegangan yang bermuatan berbeda ; (b) Semakin dekat jarak objek terhadap sensor PIR, maka semakin besar tegangan output yang dihasilkan ; (c) Semakin cepat objek bergerak, maka semakin cepat terdeteksi oleh sensor PIR karena infrared yang ditimbulkan dengan lebih cepat oleh objek semakin mudah dideteksi oleh PIR, namun semakin sedikit juga waktu yang dibutuhkan karena sudah diluar jangkauan sensor PIR.
 |
| Gambar 3.2b. Grafik PIR terhadap suhu |
komponen output :





3.Dasar Teori kembali
1.Resistor
Resistor merupakan komponen pasif yang memiliki nilai resistansi tertentu dan berfungsi untuk menghambat jumlah arus listrik yang mengalir dalam suatu rangkaian. Resistor dapat diklasifikasikan menjadi beberapa jenis, diantaranya resistor nilai tetap (fixed resistor), resistor variabel (variabel resistor), thermistor, dan LDR.










Relay
Relay adalah Saklar (Switch) yang dioperasikan secara listrik dan merupakan komponen Electromechanical (Elektromekanikal) yang terdiri dari 2 bagian utama yakni Elektromagnet (Coil) dan Mekanikal (seperangkat Kontak Saklar/Switch). Relay menggunakan Prinsip Elektromagnetik untuk menggerakkan Kontak Saklar sehingga dengan arus listrik yang kecil (low power) dapat menghantarkan listrik yang bertegangan lebih tinggi. Sebagai contoh, dengan Relay yang menggunakan Elektromagnet 5V dan 50 mA mampu menggerakan Armature Relay (yang berfungsi sebagai saklarnya) untuk menghantarkan listrik 220V 2A.

Ada besi atau yang disebut dengan nama inti besi dililit oleh sebuah kumparan yang berfungsi sebagai pengendali. Sehingga kumparan kumparan yang diberikan arus listrik maka akan menghasilkan gaya elektromagnet. Gaya tersebut selanjutnya akan menarik angker untuk pindah dari biasanya tutup ke buka normal. Dengan demikian saklar menjadi pada posisi baru yang biasanya terbuka yang dapat menghantarkan arus listrik. Ketika armature sudah tidak dialiri arus listrik lagi maka ia akan kembali pada posisi awal, yaitu normal close.
Fitur:
1. Tegangan pemicu (tegangan kumparan) 5V
2. Arus pemicu 70mA
3. Beban maksimum AC 10A @ 250 / 125V
4. Maksimum baban DC 10A @ 30 / 28V
5. Switching maksimum
Motor DC
Terdapat dua bagian utama pada sebuah Motor Listrik DC, yaitu Stator dan Rotor. Stator adalah bagian motor yang tidak berputar, bagian yang statis ini terdiri dari rangka dan kumparan medan. Sedangkan Rotor adalah bagian yang berputar, bagian Rotor ini terdiri dari kumparan Jangkar. Dua bagian utama ini dapat dibagi lagi menjadi beberapa komponen penting yaitu diantaranya adalah Yoke (kerangka magnet), Poles (kutub motor), Field winding (kumparan medan magnet), ArmatureWinding (Kumparan Jangkar), Commutator (Komutator)dan Brushes (kuas/sikat arang).
Pada prinsipnya motor listrik DC menggunakan fenomena elektromagnet untuk bergerak, ketika arus listrik diberikan ke kumparan, permukaan kumparan yang bersifat utara akan bergerak menghadap ke magnet yang berkutub selatan dan kumparan yang bersifat selatan akan bergerak menghadap ke utara magnet. Saat ini, karena kutub utara kumparan bertemu dengan kutub selatan magnet ataupun kutub selatan kumparan bertemu dengan kutub utara magnet maka akan terjadi saling tarik menarik yang menyebabkan pergerakan kumparan berhenti
















Step 3: BUAT SIMULASI PADA PROTEUS
Step 4: MENCOBA RANGKAIAN

- Prinsip Rangkaian kembali
pada rangkaian proteksi pompa air kali ini kita menggunakan 3 buah sensor yaitu pir sensor, sound sensor, dan infrared sensor.
Tidak ada komentar:
Posting Komentar